|
|
|
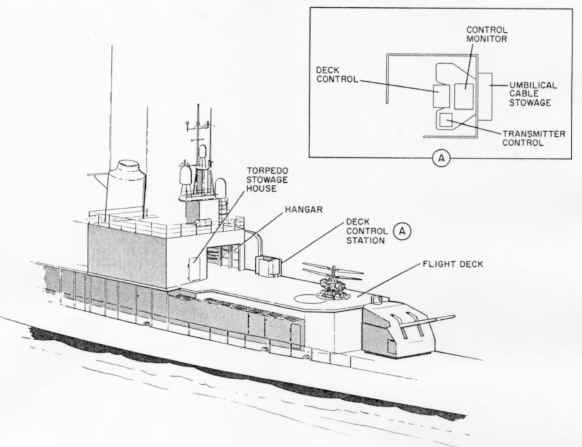
DRONE AND SHIPBOARD GUIDANCE SYSTEMThe
Navy Model QH-50D Drone (hereinafter referred to as the drone) is a remotely
controlled, rotary- wing, weapon-carrying vehicle designed specifically for
deployment from the deck of destroyer type ships in antisubmarine warfare (See
figures 1 and 2).
The
Target Control System AN/SRW-4B (hereinafter referred to as the shipboard
guidance system) is used to control the drone in the accomplishment of its
mission.
The
drone and the shipboard guidance system, together, constitute the DASH
(Drone Anti-Submarine Helicopter) Weapon System which is a basic feature of
the Navy FRAM (Fleet Rehabilitation And
Modernization) program.
The
drone and certain components of the over-all system are manufactured by, or
under the program management of,
Gyrodyne Helicopter Company. The model T50- BO- 10 or T50-BO-
12 Turboshaft Engine (hereinafter referred to as the engine) and the remainder
of the system components are items of government furnished equipment (GFE).
Figure 3 of this section lists the principal components of the DASH Weapon
System and figure 4 lists the leading particulars of the drone.
The
drone is maintained stable in flight by the Automatic Flight Control Set
AN/ASW-20 (AFC set). The Radio Receiving Set AN/ARW-78 (receiving set) receives
and decodes the command signals which originate on the destroyer and
superimposes them on the stabilization system. Primary electrical power for the
airborne system is obtained from the airborne generator which is driven by
gearing from the rotor drive system.
The
digital command guidance, or data link, system is of the pcm/fm (pulse code
modulation of a frequency modulated subcarrier) type, in which the commands are
transmitted to the drone as discrete binary coded pulses.
The
drone is capable of carrying either one of the two following weapon stores:
1.
Two Mark 44 Mod 0 torpedoes.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Figure 2; QH-50D Drone General Arrangement |
||
|
|
||
1. Tip Brakes |
7. Airborne Generator |
13. Antenna |
2. Upper rotor assembly |
8. Transmission housing |
14. MK-44 Homing Torpedo |
3. Static pressure pick-up |
9. Fuselage frame and
|
15. T50 series Turbine Engine |
4. Rotating controls |
10. AFC set components |
16. Servo actuator |
5. Lower rotor assembly |
11. Fuel Tank |
17. Non-rotating controls |
6. Bell Housing
|
12. Landing Gear
|
|
Principal System Components:Airborne Components Figure 3 |
||
Item |
Common Name |
Nomenclature |
1 |
Airframe |
Airframe System |
2 |
Engine* |
Model T50-BO-10 or T50-BO-12 Turboshaft Engine |
3 |
Antenna |
Antenna AS-1886/AKT-20 |
4 |
Receiver |
Radio Receiver R-1164/ARW-78 |
5 |
Decoder |
Command Signals Decoder KY-476/ARW-78 |
6 |
Airborne generator |
Alternating Current Generator G-59/U or G-59A/U |
7 |
Barometric altitude control |
Automatic Pilot Altitude Control C-4748/ASW-20 or Barometric Altitude Control Assembly, Y70E620149-001 |
8 |
Roll and pitch (vertical) gyroscope |
Roll and Pitch Displacement Gyroscope CN-1084/ASW-20 or CN-785/ASW-20 |
9 |
Directional gyroscope |
Directional Displacement Gyroscope CN-786/ASW-20 |
10 |
Gyroscope control box |
Gyroscope Control C-3817/ASW-20 |
11 |
Control amplifier |
Electronic Control Amplifier AM-3082A/ASW-20 or AM-3082/ASW-20** |
12 |
Servo actuator |
Electro-Mechanical Rotary Actuator TG- 95/ASW- 20 |
13 |
Relay assembly |
Relay Assembly RE-862/ASW-20 |
|
||
Principal System Components:Shipboard Components Figure 3-continued |
||
Item |
Common Name |
Nomenclature |
14 |
Deck Control* |
Transmitter Control C-3314/SRW-4C |
15 |
Deck control pedestal* |
Transmitter Control Pedestal MT-2351/SRW-4C |
16 |
CIC control* |
Transmitter Control C-3313/SRW-4C |
17 |
Coder (2)* |
Audio Frequency Coder KY-342/SRW-4C |
18 |
Transmitter control (deck)* |
Transmitter Control C-2801/SRW-4 |
19 |
Transmitter control (CIC)* |
Transmitter Control C-2804/SRW-4 |
20 |
Transmitter (2)* |
Radio Transmitting Set AN/URW-14A |
21 |
Interconnecting box (2)* |
Interconnecting Box J- 1318/SRW-4 |
22 |
Interconnecting box* |
Interconnecting Box J-1039/SRW-4 |
23 |
Interconnecting box* |
Interconnecting Box J-1052/SRW-4 |
24 |
Power supply* |
Power Supply PP-2288/SRW-4 |
25 |
Relay assembly*
|
Relay Assembly RE-434/SRW-4 |
26 |
RF transmission line switch* |
Radio Frequency Transmission Line Switch
|
27 |
Antenna (2)* |
Antenna AT-948/U |
|
||
Principal System Components:Auxiliary Operating Equipment Figure 3-continued |
||
Item |
Common Name |
Nomenclature |
28 |
Control monitor |
Control Monitor C-4298/ASW-20 |
29 |
Motor-generator |
Motor-Generator PU-559/U or PU-610/U |
30 |
Auxiliary relay box |
Shipboard Auxiliary Relay Box Y63-315620-36 or Relay Assembly RE-832/ASW-20 |
31 |
Launcher-retriever system |
Launcher-Retriever System |
32 |
Weapon skid* |
Aero 22A Skid
|
33 |
Tie down device |
Prelaunch Tiedown Device Y63SB80029-001 |
* Government furnished equipment (GFE).
|
||
Figure 4; Leading Particulars of the QH-50D DASH Drone |
|
General |
|
Rotor disk diameter |
20 ft 0 in. |
Length, rotors fore and aft
|
20 ft 0 in |
Width, maximum, rotors fore and aft |
5 ft 3 in.
|
Landing gear skid length
|
5 ft 3.64 in.
|
Landing gear skid tread, center-to-center
|
5 ft 0 in.
|
Height, over-all static
|
9 ft 8.5 in.
|
Rotor ground clearance (static)
|
6 ft 0 in.
|
Minimum clearance under lower rotor |
3 ft 8.7 in. |
Weight, empty |
1087 lb
|
Weight, normal gross*
|
2340 lb
|
|
|
Fiberglass Blades
|
Deduct 52 lb
|
One Mark 46 Mod 0 Torpedo with Mark 31 Mod 0 Air Stabilizer |
Deduct 288 lb
|
Operational Telemetry package installed, equivalent ballast removed |
No change |
|
|
|
|
2 |
Airfoil section at root (theoretical)
|
NACA 0017 Airfoil section at tip (theoretical) |
|
|
NACA
0012 Chord at root (theoretical)
|
Chord
at root (theoretical)
|
6.
5 in.
|
Area
per blade (actual)
|
6.
75 sq ft
|
Twist
|
0.
1 deg per in. (stations 30 to 120)
|
Taper
ratio
|
2:1
|
|
|
314.2 sq ft |
Solidity ratio (effective) |
0.0862
|
Disk loading (at 2340 lb normal gross weight) {Weight/Rotor disk area} |
7.45 psf |
Rotor speed |
610 rpm, nominal |
|
|
Make |
Boeing |
Model |
T50-BO-10 or T50-BO-12 |
Type |
Two-shaft gas turbine, two combustion chambers, independent output turbine |
Shaft Horsepower |
|
Interstage bleed valve active |
330 at 90ºF, military rated 365 at 59ºF, military rated |
Interstage bleed valve inactive |
300 at 90ºF, nominal available 330 at 59ºF, nominal available |
Output shaft speed |
6000 rpm, nominal |
Fuel |
MIL-T-5624 grade JP-5 |
 1.
The fueled and armed drone is moved from the hangar and spotted at the launch
area on the flight deck.
1.
The fueled and armed drone is moved from the hangar and spotted at the launch
area on the flight deck.  The drone is powered by a Boeing Model T50-BO- 10 or - 12 two- shaft gas turbine
engine, which consists of two major sections; a gas producer section, and a
power output section. There is no mechanical connection between the rotor in the
gas producer section and the rotor in the power output section. Their rotational
speeds may very independently as required by the load.
The drone is powered by a Boeing Model T50-BO- 10 or - 12 two- shaft gas turbine
engine, which consists of two major sections; a gas producer section, and a
power output section. There is no mechanical connection between the rotor in the
gas producer section and the rotor in the power output section. Their rotational
speeds may very independently as required by the load. 
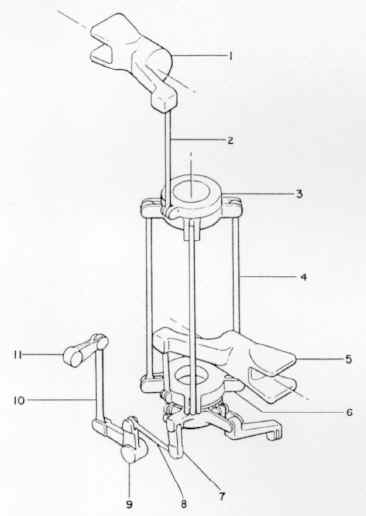
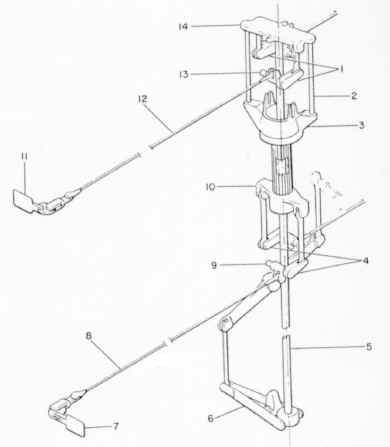
Figure 6; Rotating Controls |
|
|
|
1.
Central hoisting fitting
2.
Air deflector
3. Upper rotor tip brake bellcrank and link assembly4.
Upper pitch link assembly
5. Tip brake swivel housing assembly6. Upper swash plate assembly7.
Lower tip brake horn
8. Lower rotor tip brake bellcrank and link assembly9.
Lower pitch link assembly
10. Lower swash plate assembly11.
Lower rotor hub assembly
12. Lower gust lock and scissors assembly13.
Swash plate control link assembly
14. Upper gust lock and scissors assembly15.
Upper rotor hub assembly
16. Lower tip brake swivel actuator strut |
Figure 7; Collective Pitch System |
|
1.
Upper blade hub and pitch horn assembly
2.
Upper pitch link assembly
3. Lower blade hub and pitch horn assembly4. Lower pitch link assembly5.
Collective yoke
6. Servo actuator output arm7.
Short servo link
8. Walking beam assembly9.
Link assembly
10.
Lower swash plate assembly
11. Swash plate control link assembly12. Upper swash plate assembly |
|
Figure 8; Longitudinal Cyclic Pitch System |
|
|
|
1.
Upper swash plate assembly
2. Swash plate control link assembly3.
Lower pitch link assembly
4. Lower swash plate assembly5.
Servo actuator output-arm
6.
Short servo link
7. Bellcrank assembly8.
Link assembly
9. Bellcrank assembly10.
Link assembly
11. Lower blade hub and pitch horn assembly12.
Upper pitch link assembly
13.
Upper blade hub and pitch horn assembly
|
Figure 9; Lateral Cyclic Pitch System |
|
1.
Upper blade hub and pitch horn assembly
2.
Upper pitch link assembly
3.
Upper swash plate assembly
4.
Swash plate control link assembly
5.
Lower blade hub and pitch horn assembly
6. Lower swash plate assembly7. Bellcrank assembly8.
Link assembly
9. Bellcrank assembly10.
Short servo link
11.
Servo actuator output arm
|
|
Figure 10; Tip Brake System |
|
|
|
1. Upper
tip brake bellcrank and link assemblies
2. Lower tip brake swivel actuator strut3. Tip
brake swivel assembly
4. Lower
tip brake bellcrank and link assemblies
5. Tip brake actuator tube6. Tip
brake yoke
7. Lower
tip brake
8. Lower tip brake control rod9. Lower tip brake shaft10. Lower tip brake horn11. Upper
tip brake
12. Upper tip brake control rod13. Upper tip brake shaft14. Upper
tip brake horn
|
Figure 11; Transmission Gearing, Schematic Diagram |
|
1.
Generator drive gearing
2. Lower rotor shaft drive gear3.
Upper rotor shaft drive gear
4. Tip brake actuator tube5. First stage pinion6.
Quill shaft
7.
First stage gear
8.
Second stage pinion
9. Servo actuator drive shaft10. Overrunning clutch11. Lower rotor shaft12. Upper rotor shaft |
|
DECK |
Combat Information Center (CIC) |
Deck control |
CIC control |
Deck control pedestal |
Transmitter control (CIC) |
Transmitter control (deck) |
|
Control monitor |
|
|
Figure 13; C-3314 Deck Control Panel |
|
|
Transmitter Control (DECK) Panel |
Figure 14; C-2801 Transmitter Control (DECK) Unit and Panel face |
|
|
|
|
Figure 15; C-4298 Control Monitor and Panel |
|
|
|
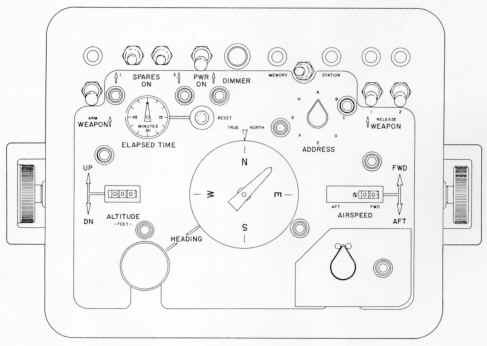 |
Figure 16; C-3313 CIC Control |
Figure 17; CIC Control Panel |
|
|
|
Figure 18; C-2804 Transmitter Control (CIC) Unit and Panel face |
|
Figure 19; DECK and CIC Transmitter Control Functions
|
|||
Control or Indicator |
Applicable to |
Function |
|
DECK |
CIC |
||
PWR switch |
X |
X |
Places both transmitter units (AN/URW-14A) (XMTR 1 and XMTR 2) in standby operation; also through relay interlock, determines deck or CIC command authority. |
STBY indicator light |
X |
X |
When lighted, indicates that transmitters 1 and 2 both are in standby operation and functioning correctly prior to application of high voltage. |
XMTR 1 - XMTR 2 Switch |
X |
X |
Selects the transmitter-coder combination to be used for the drone mission. Permits switch-over to the alternate transmitter and coder in the event of malfunction in the combination initially selected. |
ADS 1 - ADS 2 Indicator lights |
|
X |
Indicates which of the two transmitter and coder combinations has been selected at the deck station. |
CIC 1 - CIC 2 indicator lights |
X |
|
Indicates which of the two transmitter and coder combinations has been selected at CIC. |
ADS OPERATE - CIC OPERATE indicator lights |
X |
X |
Lighted according to sequence of operation of the power switches to indicate which station has command, and that high voltage has been applied to the selected transmitter. |
HV switch |
X |
X |
Controls the application of high voltage to the selected transmitter. |
CARR. ON indicator light |
X |
X |
Indicates that the selected transmitter is operating and supplying RF energy to the selected antenna. |
ANT. SEL switch |
X |
X |
Permits selection of either port or starboard antenna. |
PORT - STBD indicator lights |
X |
X |
Indicates which antenna has been selected. |
KEYED CARRIER-CONSTANT CARRIER switch |
X |
X |
Permits selection of continuous or discontinuous transmitter output. In the constant carrier mode, the transmitter produces an unmodulated RF carrier output when no commands are applied, and a modulated RF carrier when commands are applied. In the keyed carrier mode, a transmitter output (modulated carrier) is produced only when an audiomodulating signal is being applied. (The QH-50D system operates only in the constant carrier mode.) |
MODE indicator lights |
X |
X |
Indicates whether the keyed carrier or constant carrier mode of transmission has been selected. |
CODER EXTERNAL-INTERNAL switch |
X |
X |
Permits selection of the external coder associated with each transmitter or a coder contained within the transmitter case. (The QH-50D system operates only within an external coder.) |
EXTERNAL indicator light |
X |
X |
Indicates that the external coder has been selected. |
SIDE TONE receptacle |
X |
X |
Permits audible monitoring of the operation of the transmitter. |
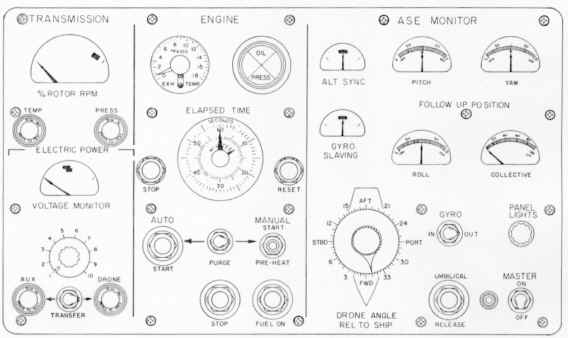
Figure 20; Control Monitor Functions
|
|
Control or Indicator
|
Function
|
MASTER switch |
Applies 28 vdc to the circuits of the control monitor. |
TRANSFER switch |
Transfers power from the auxiliary
motor-generator to the drone generator. AUX and DRONE indicator lights
show which source of power is applied to the AFC set, according to the
switch position. In the AUX position, the directional gyro slaves to the
ship gyro compass. In the DRONE position, the directional gyro is
connected into the AFC set.
|
VOLTAGE MONITOR meter and selector switch |
Positions I through 9 monitor ac output of the auxiliary or drone generator and dc output of the power supplies in the AFC set. The meter indicates nominal voltage, with an acceptable +/- 5% variation. Position 10 is not used. |
% ROTOR RPM meter |
Provides a go no-go indication of proper rotor rpm by measuring drone generator output frequency. Dial markings indicate 95%, 100%, 105%, and 110%. |
TEMP indicator light |
Light goes on when transmission oil temperature is excessive. |
PRESS indicator light |
Light goes on when transmission oil pressure is inadequate. |
EXH. TEMP meter |
Indicates engine exhaust gas temperature as an average across the four engine thermocouples. |
OIL PRESS indicator |
Indicates engine oil pressure. Green lamp lights if engine oil pressure is in proper range. Red lamp lights if engine oil pressure is inadequate (below 30 psi). |
ELAPSED TIME indicator and STOP and RESET switches |
Starts when engine starting cycle is initiated. May be stopped and/or reset to 60 to monitor drone mission time. |
ENGINE AUTO-PURGE- MANUAL mode switch |
Permits selection of automatic or manual
starting method. PURGE mode permits engine to be cranked with ignition
system and fuel system disabled in order to clear burners of accumulated
fuel following an abortive start.
|
AUTO START button
|
Initiates automatic starting cycle in which
gas producer rotor cranking time and fuel valve opening are programmed
automatically.
|
MANUAL starting switch
|
Provides non-automatic engine starting capability. The fuel must be turned on manually. |
FUEL ON switch
|
Opens the fuel solenoid valve when the engine manual start cycle is used. |
Engine STOP switch |
Closes the fuel solenoid valve to stop the
engine. Effective only while umbilical cables are connected. Can be used
also to abort an automatic engine starting cycle.
|
ALT SYNC meter |
Indicates that the barometric altitude control pickoff is nulled with the ambient barometric pressure. Synchronization takes place when the AFC set is operating from the auxiliary motor- generator (TRANSFER switch at AUX). |
GYRO SLAVING meter |
Indicates that the drone directional gyro system is nulled to a reference provided by the destroyer master gyro compass system. Slaving (alignment) takes place when the AFC set is operating from the auxiliary motor-generator (TRANSFER switch at AUX) and the directional gyro is electrically disconnected from the heading axis servo system. |
DRONE ANGLE REL TO SHIP knob and pointer |
Permits the drone directional gyro to be
referenced to the destroyer gyro compass system regardless of the angle at
which the drone is spotted on the deck. The pointer indicates the engine
air inlet.
|
FOLLOW UP POSITION meters (PITCH, ROLL, YAW, COLLECTIVE) |
Indicate direction and magnitude of
displacement of the respective servo actuator output arms for given
command inputs. Permit quantitative check of drone response to command
inputs during prelaunch command tests.
|
GYRO switch |
Permits roll and pitch gyro pickoff outputs to be removed electrically from the related servo system axes. When the switch is in the OUT position, the control system is unaffected by pitch and roll of the destroyer. |
UMBILICAL RELEASE switch |
Actuates the AFC set and engine umbilical connector release solenoids, disconnecting the umbilical cables from the drone. The power transfer and gyro disengage relays are interlocked with the separation of the AFC set umbilical cable connector for safety. |
PANEL LIGHTS knob |
Controls the level of panel illumination. |
Figure 21; DECK and CIC Control Functions
|
|||
Control or Indicator |
Applicable to |
Function |
|
DECK |
CIC |
||
PWR |
X |
X |
Energizes the panel lights, motor drive circuits, and the on-off function indicator lights. The interrogation pulses from the coder do not pass through this switch; thus, commands still can be applied with the switch in the off position. |
CRUISE-MANUV switch |
X |
|
Determines mode of drone flight control. In
the maneuver (MANUV) mode, the drone is controlled by the altitude knob
and the maneuver stick. (Rotation of the maneuver stick energizes a motor
which drives the heading knob. ) In the cruise mode, the drone is
controlled by the altitude knob, the airspeed knob, and the heading knob.
|
STATION-MEMORY switch |
X |
X |
In the station position, commands
originating in the deck or CIC control direct the drone flight. In the
memory position, the drone automatically retains its last commanded
altitude, airspeed, and heading until control is returned to station.
|
HEADING knob and pointer |
X |
X |
Commands and indicates drone fuselage heading. The pointer rotates with the knob to indicate commanded fuselage heading. At the CIC station, the heading card remains fixed with 0 at the TRUE NORTH index. At the deck station, the heading card remains slaved to the ship gyro compass regardless of ship heading. |
Maneuver stick |
X |
|
In the maneuver mode only, controls the
direction of the horizontal flight of the drone according to the direction
of deflection. The drone flies in the direction of stick deflection
regardless of the heading of the drone fuselage. When the stick is twisted
clockwise or counterclockwise, it energizes an electric motor which drives
the heading knob and pointer in the corresponding direction.
|
LATERAL TRIM |
X |
|
In the maneuver mode only, indicates the
direction and exact magnitude of the roll command when the maneuver stick
is displaced exactly perpendicular to the heading pointer. Pointer travel
decreases as the deviation from perpendicular movement increases. Pointer
remains at 0 when the maneuver stick is moved parallel to the pointer.
|
AIRSPEED knob and readout |
X |
X |
In the cruise mode only, rotation of the
knob commands forward or aft airspeed. The readout provides an approximate
indication (in knots) of drone airspeed. True airspeed versus command
readout data is shown in “Performance
Data” section.
|
ALTITUDE knob and readout |
X |
X |
Commands the flight altitude of the drone in
both maneuver and cruise modes. The readout provides an indication (in
feet) of the altitude commanded.
|
ALTITUDE RATE switch |
X |
|
Energizes a motor which drives the altitude
knob and readout. The switch lever is spring-centered at neutral and is
pressed upward to increase altitude or downward to decrease altitude. The
switch also causes the pre- launch tie down device to be released from the
drone when the lever is moved upward, provided that PWR switch is in the
ON position.
|
ADDRESS selector switch |
X |
X |
Selects three changeable bits in the message structure to synchronize
the coder and decoder. The drone responds to commands only when the
address selector switch setting matches the address setting on the
decoder.
|
ELAPSED TIME indicator and RESET button |
|
X |
Starts when the CIC control power is turned on. May be reset to 0 by pressing the button to register drone mission time and to aid in maintaining a dead reckoning plot. |
WEAPON ARM switch |
|
X |
Energizes the arming solenoids on the drone prior to re- leasing the
weapon or weapons. Utilizes a two-way on- off channel, i. e., the weapons
may be armed, then de-armed by returning the switch to its off position.
|
WEAPON RELEASE switches (1 and 2) |
|
X |
Actuate the bomb shackle release solenoids to release the weapons. The left-hand weapon is released by switch 1; the right-hand weapon is released by switch 2. A center weapon is released by switch 1. |
WEAPONS JETTISON switch |
X |
|
Provides emergency weapon release capability at the deck station (Added to original components by Target Control System Change No. 14). |
SPARES switches (1 and 2) |
X |
X |
Actuate two on-off channels. Not connected in the present system. |
ENG OFF switch |
X |
|
Initiates a drone shutdown sequence. When the switch is moved in the direction indicated by the arrow, the carrier and gyro signals are removed and the cyclic controls are driven to neutral, the control locks are engaged and the fuel is shut off. The airborne electrical circuit passes through the skid switches so that the engine cannot be shut off while the drone is airborne. |
CABLE REL switch |
X |
|
Not used in the present system.
|
DIMMER knob |
X |
X |
Controls the level of panel illumination. |

![]()
![]()
![]()
|
The name "Gyrodyne" in its stylized
form above, is the Trademark of and owned by the Gyrodyne Helicopter Historical
Foundation; unauthorized use is PROHIBITED by Federal Law. All Photographs, technical specifications, and
content are herein copyrighted and owned exclusively by Gyrodyne Helicopter
Historical Foundation, unless otherwise stated. All Rights Reserved
©2013. |